研究内容Research
超音速飛行に向けたUAV制御技術
2. 小型無人超音速機向けトラック飛行を実証する制御系
研究目的
トラック飛行とそれを実証する制御系構成
航空機をトラック飛行させるためには、下図のように水平飛行モードと旋回モードを組み合わせ、切り替えます。
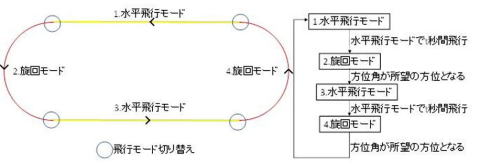
トラック飛行におけるモード切り替え
一般に飛行モードの切り替えに対して機体姿勢の変化は遅れて起こり、この姿勢変化の遅れは飛行経路に影響してしまい特に旋回モードから水平飛行モードへの切り替えにおいては所望の旋回より大きく旋回してしまうことになります。
一方、水平飛行モードから旋回モードへの切り替えにおいては水平飛行距離が伸びるだけでトラック飛行への影響は小さいので制御系設計ではここでは考慮しません。
トラック飛行を行うには水平飛行の距離が一定である必要があるので、本手法では航空機の速度は一定で制御されているものと仮定して、水平飛行モードの時間を定めることで水平飛行距離が一定となるよう制御します。また旋回モードでは上で述べた姿勢変化の遅れを考慮し、方位角が180deg以下の値に到達した時点で水平飛行モードへ切り替えています。
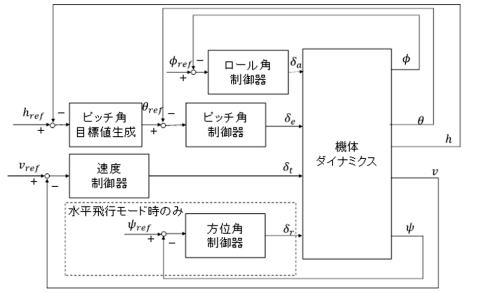
水平飛行モード・旋回飛行モード制御系
算出することでロール角、ピッチ角、方位角の各姿勢制御角及び速度、高度を制御しています。
実証実験結果
これらの要素を考慮して設計した誘導制御系を電動ラジコン機に搭載して実証実験を行い、
その飛行経路は下に示すようになりました。

今後の展望
今回の実験で得られたデータやノウハウをもとに、現在室蘭工業大学航空宇宙機システム研究センターで研究が進めら れている、超音速無人機「オオワシ2号機」において誘導制御技術の実証を行って行きます。

